图像清晰度评价算法有很多种,在空域中,主要思路是考察图像的领域对比度,即相邻像素间的灰度特征的梯度差;在频域中,主要思路是考察图像的频率分量,对焦清晰的图像高频分量较多,对焦模糊的图像低频分量较多。
这里实现3种清晰度评价方法,分别是Tenengrad梯度方法、Laplacian梯度方法和方差方法。
1.Tenengrad梯度方法
Tenengrad梯度方法利用Sobel算子分别计算水平和垂直方向的梯度,同一场景下梯度值越高,图像越清晰。以下是具体实现。

Mat img;
Mat imgROI;
Mat imgGray;
Mat imageSobel;
//添加图片
img = Mat(m_frameInfo.uHeight/4, m_frameInfo.uWidth/4,CV_8UC3, pRGB).clone();
//设置ROI尺寸
imgROI.create(img.rows, img.cols, CV_8UC3);//生成ROI图img(Rect(width, height, 150, 150)).copyTo(imgROI);//转灰度图cvtColor(imgROI, imgGray, CV_BGR2GRAY);//Sobel算子计算梯度值Sobel(imgGray, imageSobel, CV_16U, 1, 1);//传值meanValue = mean(imageSobel)[0];
//返回值
return meanValue;
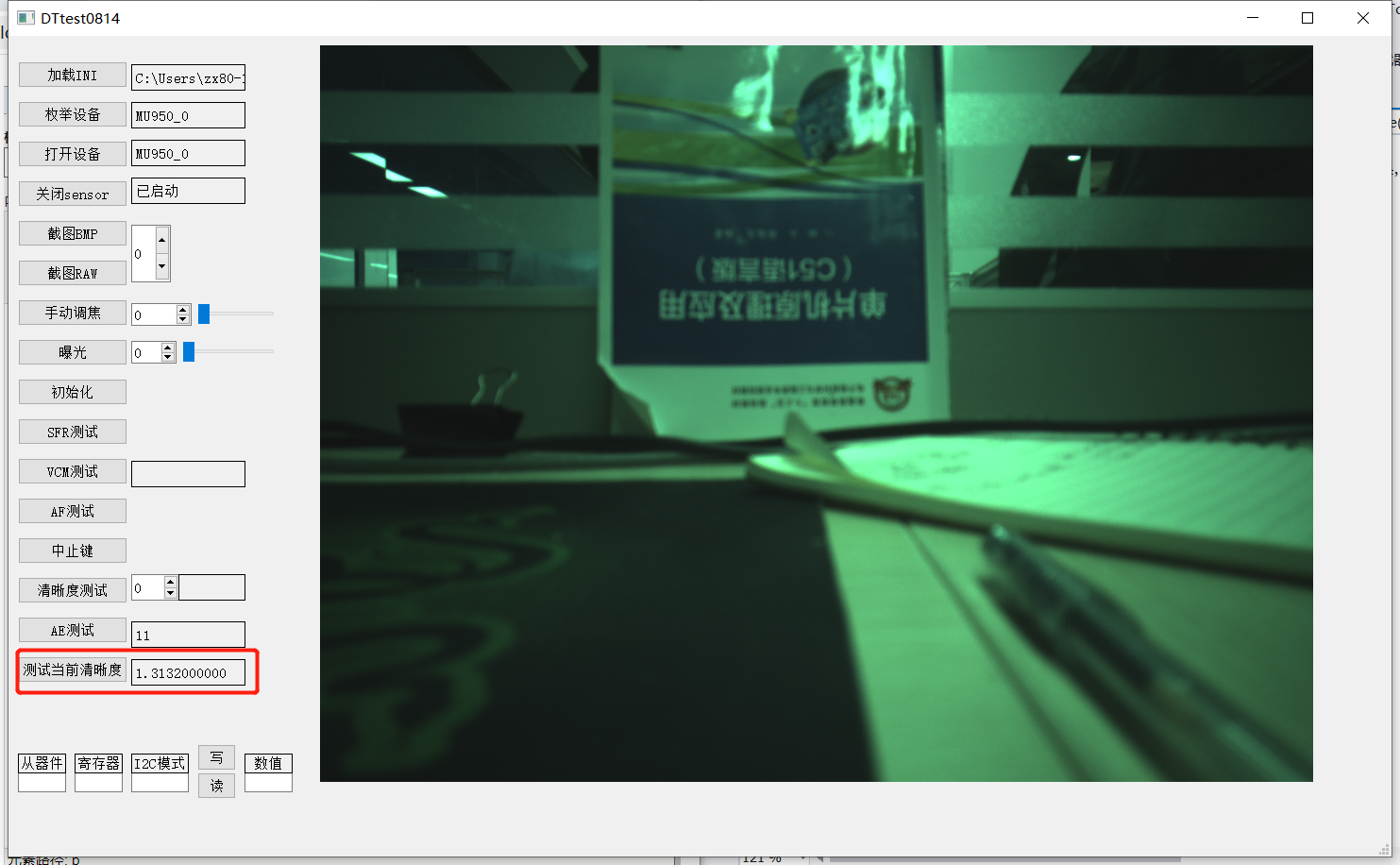
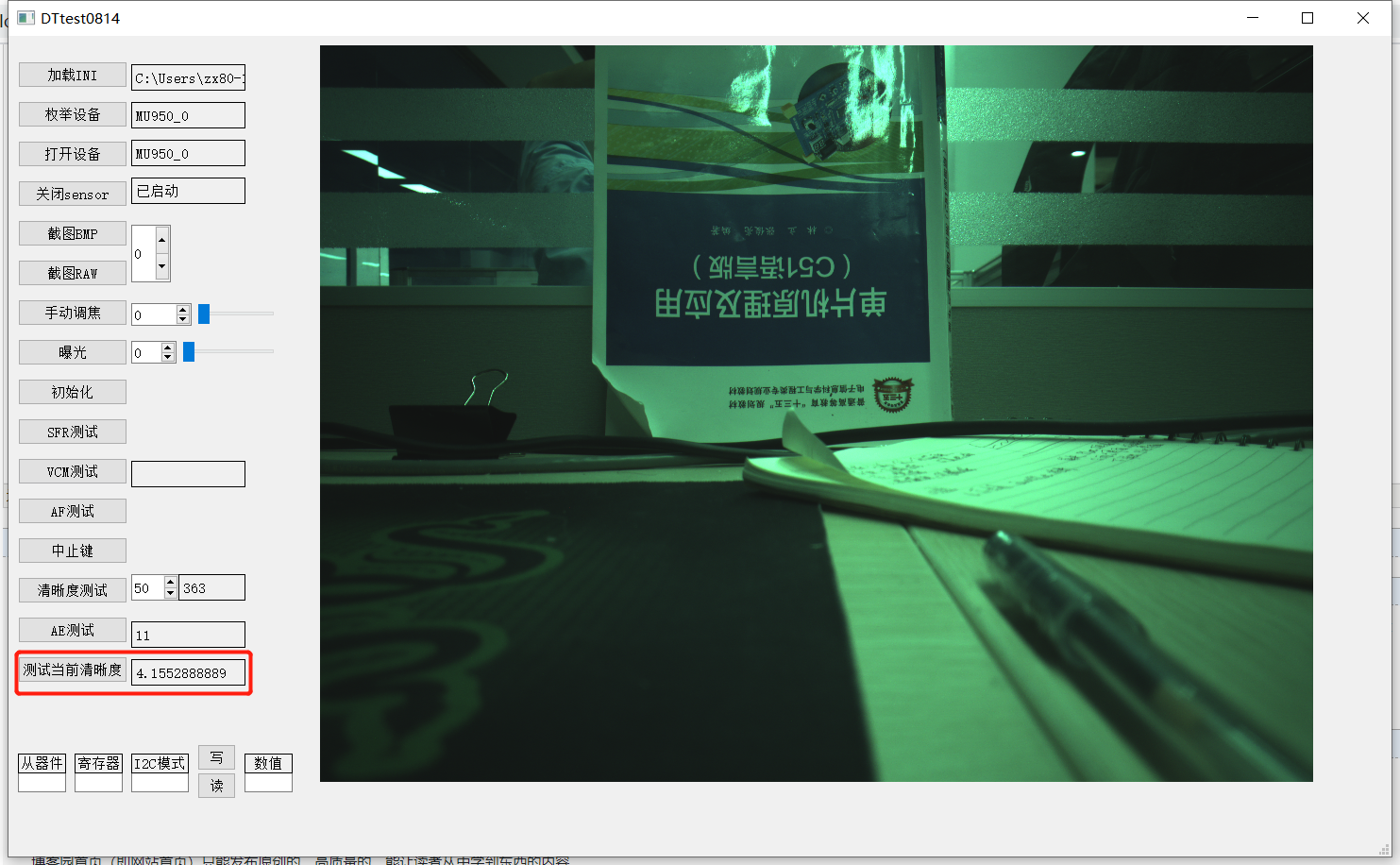
这里衡量的指标是经过Sobel算子处理后的图像的平均灰度值,值越大,代表图像越清晰。
2.Laplacian梯度方法
Laplacian梯度是另一种求图像梯度的方法,在上例的OpenCV代码中直接替换Sobel算子即可。
Mat img;
Mat imgROI;
Mat imgGray;
Mat imageSobel;
//添加图片img = Mat(m_frameInfo.uHeight/4, m_frameInfo.uWidth/4,CV_8UC3, pRGB).clone();//设置ROI尺寸imgROI.create(img.rows, img.cols, CV_8UC3);//生成ROI图img(Rect(width, height, 150, 150)).copyTo(imgROI);//转灰度图cvtColor(imgROI, imgGray, CV_BGR2GRAY);//Laplacian算子计算梯度值,就换了算子而已Laplacian(imageGrey, imageSobel, CV_16U);//传值meanValue = mean(imageSobel)[0];//返回值return meanValue;
测试结果都是数据越大,图像越清晰的,这里不作展示了。
3.方差方法
方差是概率论中用来考察一组离散数据和其期望(即数据的均值)之间的离散(偏离)成都的度量方法。方差较大,表示这一组数据之间的偏差就较大,组内的数据有的较大,有的较小,分布不均衡;方差较小,表示这一组数据之间的偏差较小,组内的数据之间分布平均,大小相近。对焦清晰的图像相比对焦模糊的图像,它的数据之间的灰度差异应该更大,即它的方差应该较大,可以通过图像灰度数据的方差来衡量图像的清晰度,方差越大,表示清晰度越好。
Mat img;
Mat imgROI;
Mat imgGray;
Mat imageSobel;
Mat meanValueImage;
//添加图片img = Mat(m_frameInfo.uHeight/4, m_frameInfo.uWidth/4,CV_8UC3, pRGB).clone();//设置ROI尺寸imgROI.create(img.rows, img.cols, CV_8UC3);//生成ROI图img(Rect(width, height, 150, 150)).copyTo(imgROI);//转灰度图cvtColor(imgROI, imgGray, CV_BGR2GRAY);//求灰度图像的标准差meanStdDev(imageGrey,meanValueImage,imageSobel);//传值meanValue = mean(imageSobel)[0];//返回值return meanValue;
测试结果都是数据越大,图像越清晰的,这里不作展示了。
在OpenCV中,可以使用拉普拉斯算子来检测图像的清晰度。拉普拉斯算子能够突出图像的边缘,如果图像边缘清晰,则拉普拉拉算子处理后的图像与原图像相比将显示较高的对比度。以下是使用OpenCV进行图像清晰度检测的Python代码示例:
在这个代码中,我们首先读取了一个图像并将其转换为灰度图像。然后,我们使用cv2.Laplacian函数计算拉普拉斯算子的值,并使用.var()方法计算拉普拉斯图像的方差来估计清晰度。根据方差与设定的阈值比较结果,我们可以判断图像是否清晰。如果需要可视化结果,我们可以展示原始图像和拉普拉斯算子处理后的图像。
消除图像的反光,可以通过以下步骤实现:
-
转换图像到 HSV 颜色空间。
-
使用 inRange 函数来找到图像中的白色区域,这通常是反光的部分。
-
应用掩模以减少反光影响。
以下是使用 Python 和 OpenCV 实现的示例代码:
这段代码会显示原图、掩模、去除反光后的图像以及最终融合后的图像。您可能需要根据您的图像调整阈值范围以提取到正确的白色区域。
![[IOI2019] 景点划分](https://img2024.cnblogs.com/blog/2154112/202404/2154112-20240425155553962-801660969.png)